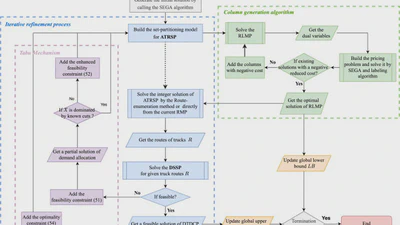
A matheuristic solution for efficient scheduling in dynamic truck–drone collaboration
Develops a matheuristic framework to address complex synchronization constraints in dynamic truck-drone collaboration.
Jinqiu Zhao
•
•
1 min read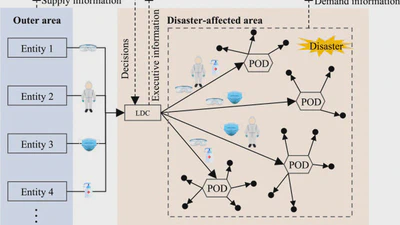
Dynamic heterogeneous resource allocation in post-disaster relief operation considering fairness
Fair resource allocation strategy in dynamic disaster relief operations.
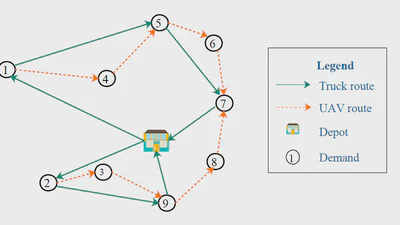
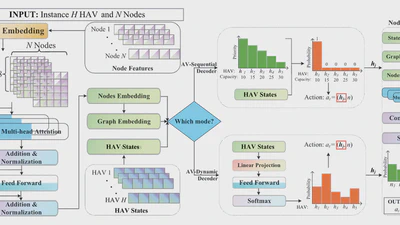
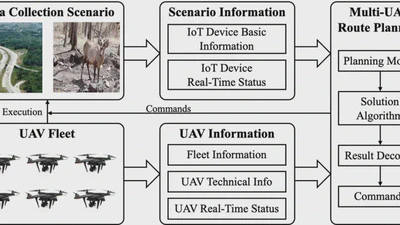
Dynamic Truck–UAV Collaboration and Integrated Route Planning for Resilient Urban Emergency Response
Propose a novel dynamic truck-UAV collaboration strategy.